3
chassis iterations
4
wheels — independent suspension
2
fabrication methods
Python
autonomy stack
The Awake Challenge is an inter-school engineering competition organised by Awake Group, challenging student teams from different engineering schools to design, build, and program a miniature autonomous vehicle from scratch. The goal: fastest and most reliable navigation through a defined course.

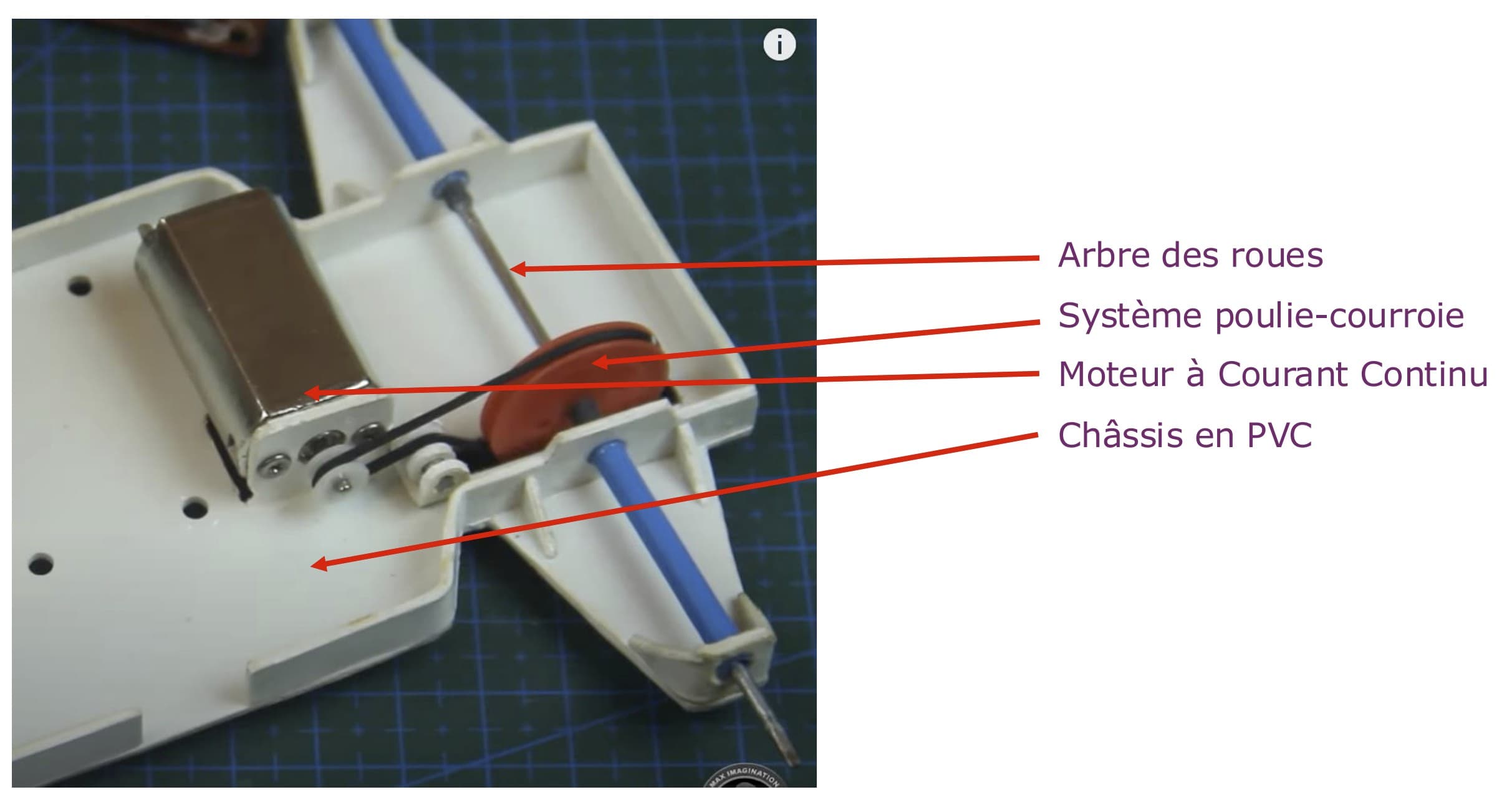
Mechanical design — three iterations
The initial chassis was machined from PVC sheet — lightweight, easy to work with, dimensionally stable. The drivetrain used a single DC motor (MCC) with a belt-pulley transmission driving the rear wheel axle, and adjustable geometry for wheel alignment.
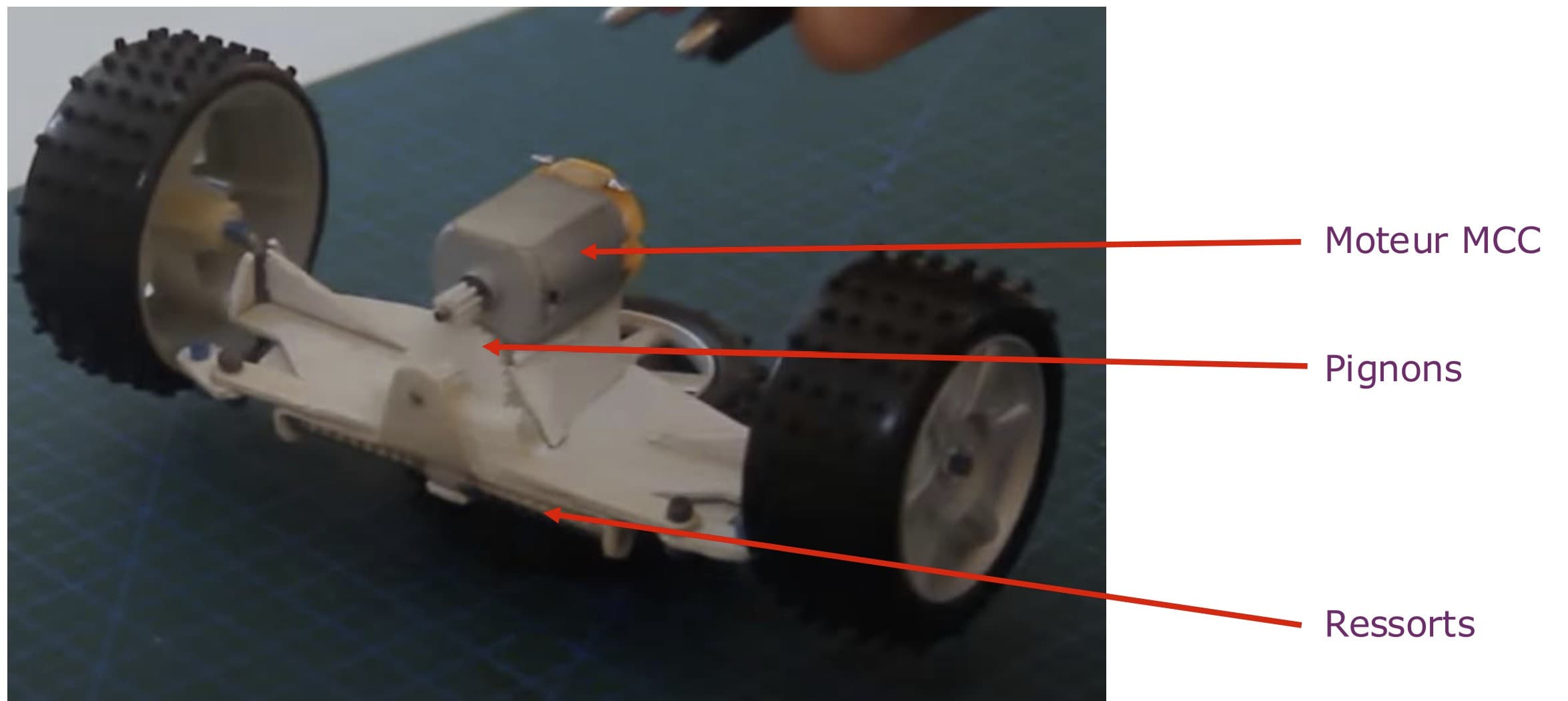
The drivetrain was then redesigned around a gear train instead of a belt, improving transmission efficiency and reducing slip. Spring suspension was added to all four wheels for ground contact stability on uneven surfaces.
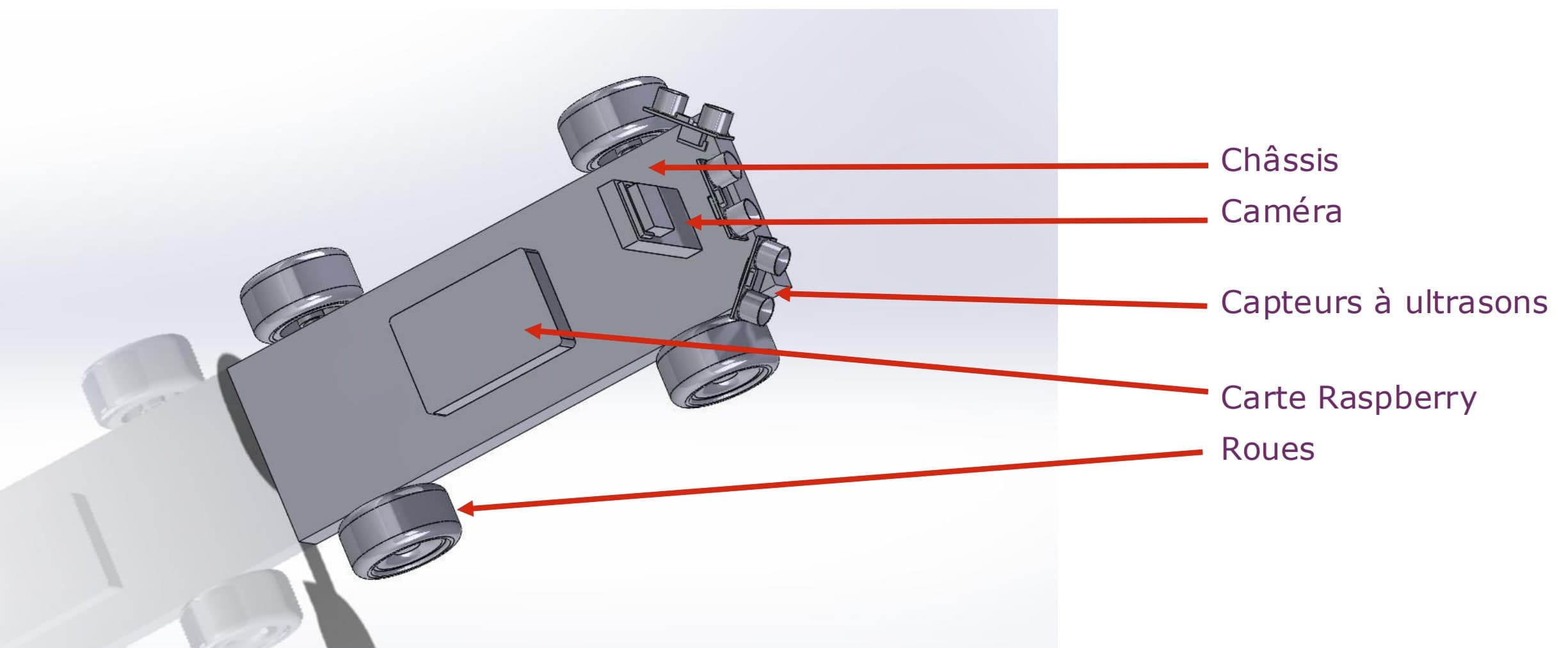
The final chassis was fully modelled in SolidWorks and 3D-printed, with a compact form factor to reduce mass and inertia, a front-mounted camera recess at a fixed viewing angle, lateral ports for ultrasonic sensor alignment, and an integrated Raspberry Pi mounting plate.
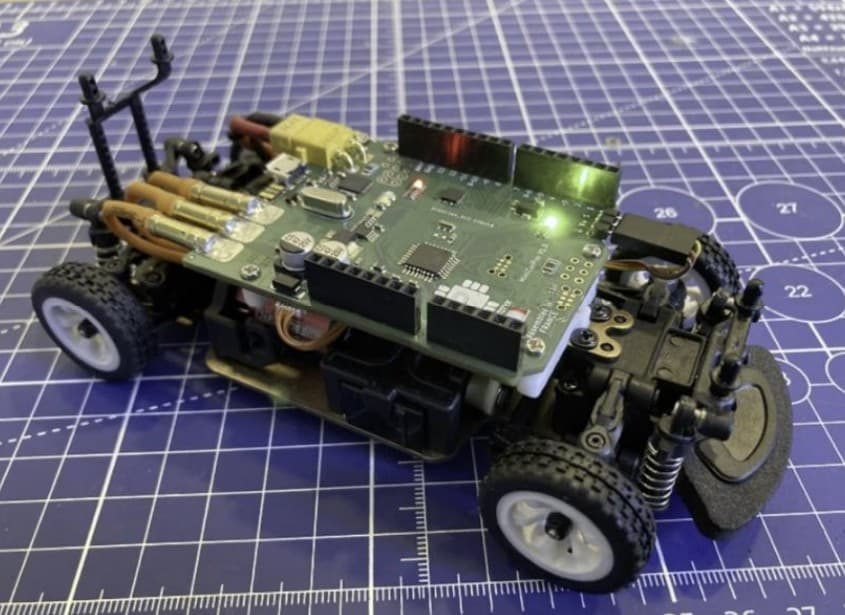
Electronics & autonomy
The vehicle used a Raspberry Pi as the main computing unit, connected to ultrasonic sensors for multi-angle obstacle detection, a camera module for lane following and path recognition, and a motor driver board for speed and direction control. The autonomy stack was programmed in Python, with sensor fusion from the ultrasonic array feeding a reactive navigation controller.
A faster fallback: laser-cut chassis
Alongside the 3D-printed version, a complete laser-cut design was produced — chassis body, spoiler, side walls, and support brackets — all dimensioned for flat-sheet fabrication.
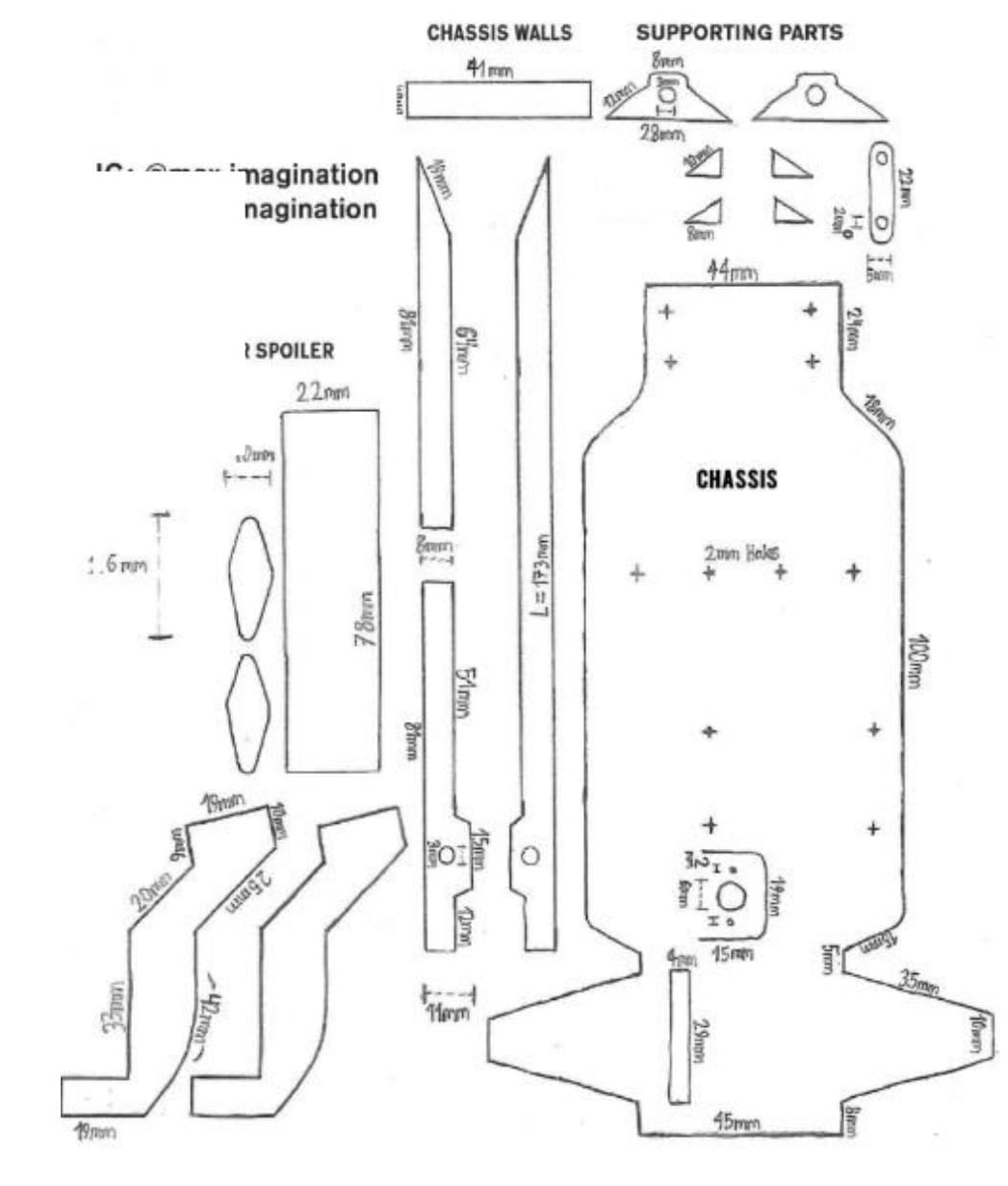
Two fabrication paths for one chassis: 3D printing for the primary build, laser-cutting as a faster-to-manufacture fallback.
What this demonstrates
An end-to-end hardware project: from competition brief to a physical, working autonomous vehicle. Each mechanical iteration — prototype, gear-train redesign, final 3D-printed chassis — had a specific rationale, and the project integrates mechanics, electronics, and software in a single system, with a CAD-to-fabrication workflow spanning both 3D printing and laser cutting.